
AGV伺服马达驱动器-ABH3系列

驱动器 更紧凑,更容易使用!
2轴一体型AC伺服驱动器
1.与本公司以往产品(ABH2)相比,实现了体积比约65%
通过更加紧凑,可以加速产品的小型化
2.马达驱动指令分别对应运行、旋转。
可通过AGV的前进、后退运行指令、左右旋转指令的管理、
各马达轴的速度(扭矩)指令进行控制。
3.通过外部模拟电压和内部速度指令表的组合,
可对应8种指令控制。
也可以通过PLC等I/O开关进行速度切换。
AC伺服 电池 旋转变压器
模拟电压指令 速度控制 扭矩控制
规格
型号
ABH3-0404
ABH3-0606
ABH3-0808
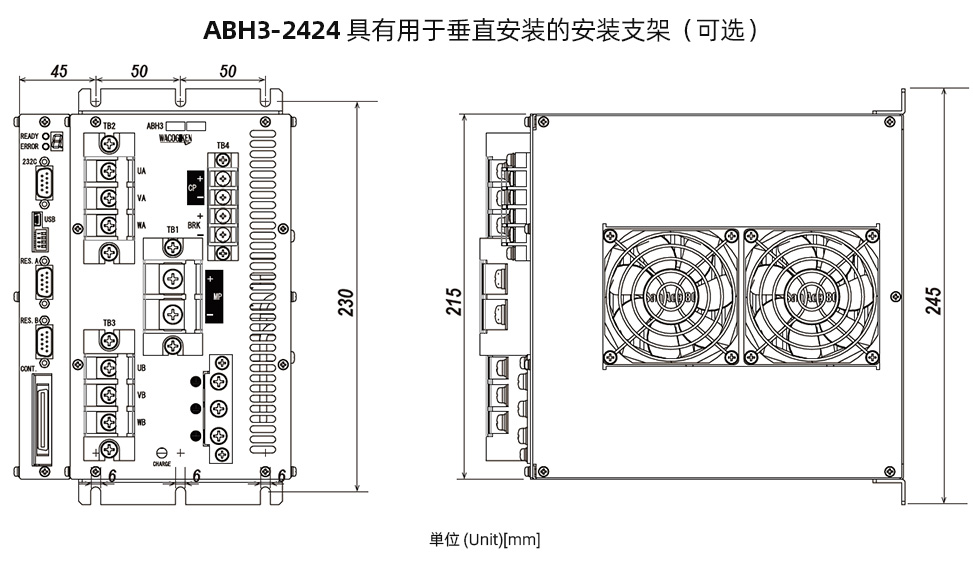
ABH3-2424
控制电源/主电源(保证工作)[V]
DC24~48(DC20~60)
额定电流[Arms]
14.1
21.2
26
65
瞬时最大电流[Arms]
28.2(40)
28.2(40)
28.2(40)
28.2(40)
超驱动率[%]
200
260
制冷方式
散热器,自然风冷
散热器形状[mm]
平板,厚度5
带导向片,
高17
带导向片,
高30
DC风扇强制空冷
功率控制方式
基于功率MOSFET的三相正弦波PWM
马达构造和马达传感器
PM型同步马达/BRX型无刷旋转变压器(1X)
使用环境
0 ~ 45℃85% Rh以下
最大尺寸*1宽度(W) /高度(H) /进深(D) [mm]
W:53/H:215
/
D:183
W:53/H:215
/
D:183
W:53/H:215
/
D:183
W:53/H:215
/
D:183
质量[Kg]
约2
约2.3
约2.6
约6
控制模 式
控制轴
A-B轴
每个马达都独立控制
行走/旋转轴
合成马达响应的驱动轴的控制
控制模式
速度/扭矩控制
每个控制轴都可设定
主站/从站
通过a/b轴控制(每个马达的独立控制)有效。在扭矩控制中使用主轴的速度控制和从轴。将速度控制输出(扭矩命令)分配到从指令
指令输 入
模拟电压
4CH输入(指令输入2CH+校正输入2CH)双极输入(10v)单极输入(0-+5[V] 2.5[V]中心)
内部指令
将参数设定值作为指令输入。除了指令值之外,最大8组注册增益/加速/减速设定等指令值,通过控制输入进行切换
指 令计 算
加速/减速控制
加速度和减速度可分别单独设定。支持S形加减速计算。
极性切换
通过控制输入切换指令极性
校正计算
通过制作输入选择输入的有效/无效,有效时的加法/减法
控制输入输 出
输入
专用输入1点/通用输入20点(开路集电极规格时18点)
输出
可通过参数设定重新定义错误输出1点/警报输出1点/代码输出4点警告/异常状态输出,准备输出1点/闲输出1点全部输出8点
24v电机电源用
额定容量W
165W最大
300W最大
380W最大
—
B系列
B500E-D2R(B)
B201E-D2R(B)
特殊规格
—
B101E-D2R(B)
B301E-D2R(B)
—
AWRⅡ
AWRⅡ010B
AWRⅡ030B-P
—
SWR
SWR010B-T11
SWR020B-T15
—
—
SWR040B-T23
—
48v电机电源用
额定容量W
250W,400W(最大)
600W,750W(最大)
2.2KW(最大)
B系列
B401E-D4R(B)
B751E-D4R(B)
B152E-D4R(B)
—
—
B222E-D4R(B)
AWRⅡ
—
AWRⅡ075B-P
AWRⅡ220B
选项
■ 解析器中继电缆
|
GP-RC2 |
2m |
|
GP-RC3 |
3m |
|
GP-RC5 |
5m |
|
GP-RC8 |
8m |
■ 维修工具
个人电脑用软件·TelABH3 for Windows
通信电缆(RS232C)·NS-RS9
(USB)·MiniB型USB线缆
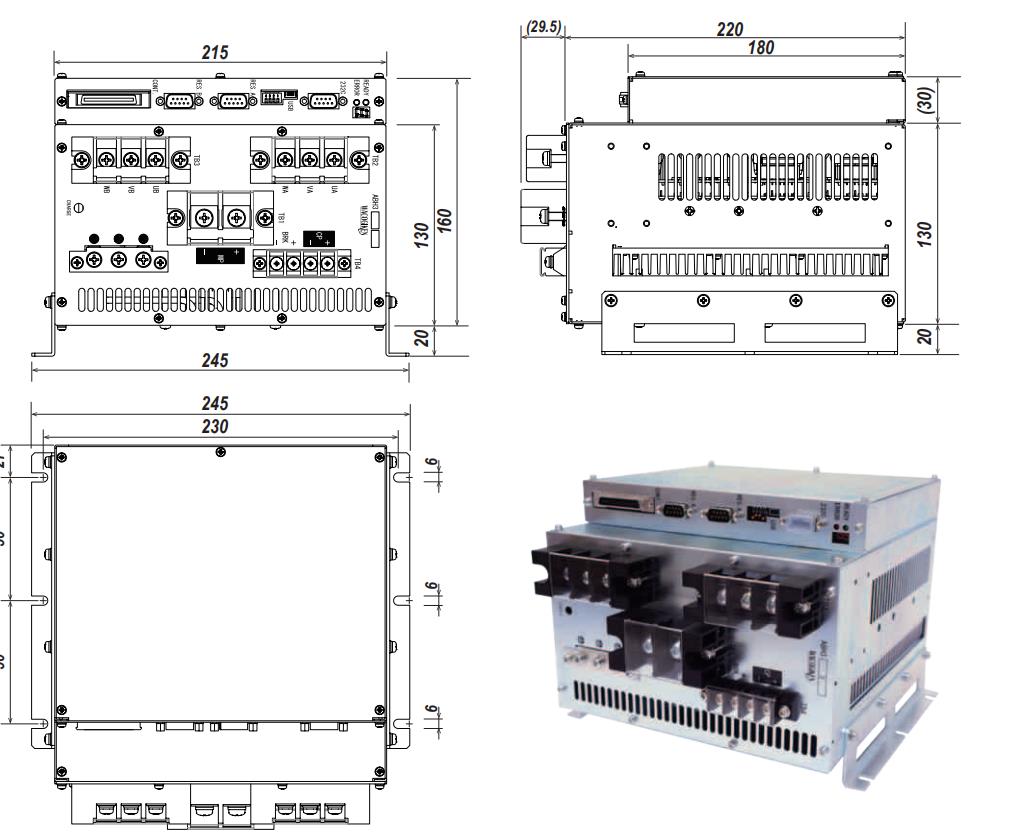
外形尺寸
ABH3-0404 ABH3-0606 ABH3-0808

ABH3-2424
.png)


 当前位置:
当前位置: